
ممکن است فکر کنید که با وجود بهرهگیری از انواع دوربین و حسگرهایی که در خودروهای خودران (مستقل) استفاده میشوند، آنها میتوانند در هر جادهای یا هر مکانی از عهده اداره کردن رانندگی برآیند. در واقع اینطور نیست، اگرچه به زودی ممکن است به لطف سیستم جدید مپلایت (MapLite) در دانشگاه ماسوچوست (MIT) چنین امکانی فراهم شود.

خودروهای خودران که هنوز در مرحله توسعه قرار دارند، تنها میتوانند برای رانندگی در جادههای شهری مورد استفاده و اعتماد قرار بگیرند. در این اماکن شهری، خودروی خودران با استفاده از نقشههای سهبعدی پیش ساخته میتوانند موقعیت دقیق اقلام ثابت مانند خطوط، محدودیتها و نشانههای توقف را که قبلا به صورت دستی برچسبگذاری شدهاند، تشخیص دهند. حسگرهای خودروی خودران نیز عمدتا برای شناسایی و اجتناب از برخورد با موانع متحرک و پویا مانند عابران پیاده و سایر وسایل نقلیه موجود استفاده میشوند. در مواردی که خودروی خودران بخواهد از جادههای روستایی یا بین شهری عبور کند، انگیزهای برای برچسبگذاری تمام نقشهها وجود ندارد، بنابراین خودروهای خودران نمیتوانند از آنها عبور کنند. این جایی است که سیستم مپلایت وارد میشود؛ مپلایت با استفاده از GPS، تشخیص میدهد که خودرو در چه جادهای و با چه شرایطی قرار دارد، در نتیجه تخمین تقریبی از مکان فعلی خود و هدایت آن به سمت مقصد نهایی را انجام میدهد. با این حال، حسگرهای تشخیص و ردیابی نور یا لیدار (LiDAR) در خودروی خودران، بلافاصله برای تشخیص جاده در اطراف آن استفاده میشوند.
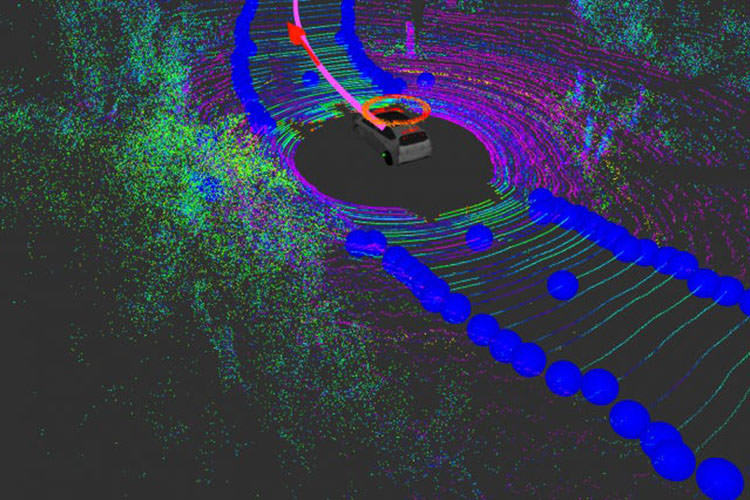
این سیستم به طور مداوم مدلهای ابری نقطهای سهبعدی برای "اهداف ناوبری محلی" جدید در جاده قابل مشاهده پیشرو ایجاد میکند و سپس بهترین مسیر را برای رسیدن به هر یک از این اهداف ارائه میدهد. علاوه بر این، حسگرهای لیدار برای تعیین لبههای جاده مورد استفاده قرار میگیرند، البته بر اساس این فرضیه که سطح جاده نرمتر از زمین اطراف است. علاوه بر این، سیستم مپلایت مدلهای رایانهای نیز ارائه میدهد که به خودروی خودران در مورد نحوه برخورد با برخی شرایط اساسی کمک میکنند؛ این مدلها در شرایط مانند هنگام نزدیکی به تقاطع توصیه میشوند. با وجود تمام مزایای گفته شده، این فناوری هنوز نمیتواند شامل تمام متغیرهای احتمالی موجود در انواع جاده شود، که از جمله میتوان به تغییرات چشمگیر در ارتفاع اشاره کرد که در جادههای کوهستانی رخ میدهد. عملکرد سیستم مپلایت به طور خاص تاکنون با استفاده از تویوتا پریوس (Prius)، در تعدادی از جادههای ایالات متحده آمریکا در نزدیکی دیونز ماساچوست با موفقیت آزمایش شده است. علاوه بر این، سیستم مپلایت مدلهای رایانهای نیز ارائه میدهد که به خودروی خودران در مورد نحوه برخورد با برخی شرایط اساسی کمک میکنند؛ این مدلها در شرایط مانند هنگام نزدیکی به تقاطع توصیه میشوند. با وجود تمام مزایای گفته شده، این فناوری هنوز نمیتواند شامل تمام متغیرهای احتمالی موجود در انواع جاده شود، که از جمله میتوان به تغییرات چشمگیر در ارتفاع اشاره کرد که در جادههای کوهستانی رخ میدهد. عملکرد سیستم مپلایت به طور خاص تاکنون با استفاده از تویوتا پریوس (Prius)، در تعدادی از جادههای ایالات متحده آمریکا در نزدیکی دیونز ماساچوست با موفقیت آزمایش شده است. تدی اورت دانشجوی کارشناسی ارشد و نویسنده اصلی مقالهای در مورد این فناوری جدید میگوید: من تصور میکنم که خودروهای خودران آینده، از نقشههای سهبعدی در مناطق شهری استفاده میکنند. اما هنگامی که فردی خواستار سفر از طریق مسیرهای ناهموار و روستایی باشد، این وسایل نقلیه نیز باید بتوانند به اندازه انسانها در جادههای ناآشنا که قبلا هرگز ندیدهاند، رانندگی کنند. امیدواریم که کار ما، گامی در جهت دستیابی به این هدف باشد.




